● 原発のたたみ方 8
頼みは遠隔操作ロボット 放射線への耐用性、課題
毎日新聞2020年5月28日
高い放射線量が廃炉作業の大きな障壁となっている東京電力福島第1原発。作業員が建屋の中心部などに近づくことができない中、遠隔操作型のロボットが頼りとなっている。専門家は「今後、高線量エリアでの作業が多くなり、よりニーズは高まる」と話す。
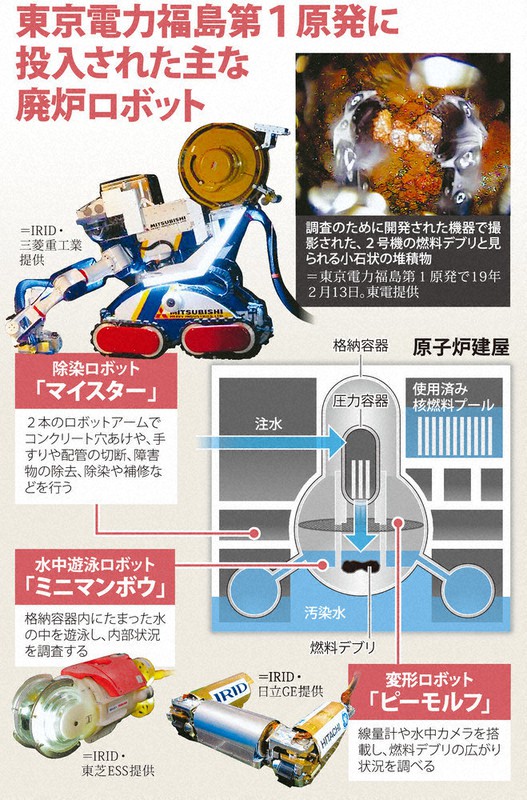 事故から6年が過ぎた2017年3月の福島第1原発1号機。防護服に身を包んだ作業員たちが、原子炉格納容器につながる配管にロボット「ピーモルフ」を投入した。配管内を進む時は円筒のような形をしているが、格納容器内へ入り金網でできた足場にたどり着くと、コの字形に変形した。格納容器内の空間放射線量は毎時10シーベルト前後と高い。金網の約1・5メートル下には汚染水がたまる。 事故から6年が過ぎた2017年3月の福島第1原発1号機。防護服に身を包んだ作業員たちが、原子炉格納容器につながる配管にロボット「ピーモルフ」を投入した。配管内を進む時は円筒のような形をしているが、格納容器内へ入り金網でできた足場にたどり着くと、コの字形に変形した。格納容器内の空間放射線量は毎時10シーベルト前後と高い。金網の約1・5メートル下には汚染水がたまる。
操作していたのは原子炉建屋内に設けられた指示室の防護服姿の作業員だ。ロボットにはカメラが付いており、映像を凝視しつつ専用のコントローラーで動かしていた。ロボットが調査地点に達すると、カメラと線量計がついたケーブルを金網の隙間(すきま)から垂れ下げ、汚染水へ沈めていく。すると画面には、黄色い落下物に覆われた格納容器の底が浮かび上がった。
ロボット開発に加わった日立GEニュークリア・エナジーの岡田聡主任技師は「当初は(溶け落ちた核燃料など)燃料デブリの広がりを調査するのが目的だったが、この調査で堆積(たいせき)物が想定外に存在することが明らかになった」と当時の驚きを振り返った。この辺りの線量は今もそれほど下がっていないとみられ、作業員は立ち入ることができない。
●内部状況分からぬまま
このロボットには苦い歴史がある。1号機で15年、前身となるロボット2機が投入されたが、1機は脱輪。もう1機は放射線の影響でカメラに不具合が起き、いずれも遠隔操作はできなくなった。作業場には人が入れず、回収もできていない。
福島第1原発の廃炉作業で活用されるロボットの設計、開発の課題について、浅間一・東京大教授(ロボット工学)は「事故後の原子炉内の状況がよく分かっていない」「作業場まで人が近づけず投入方法が制限される」「作業場の環境が劣悪」という3点を挙げる。
つまり、周囲の状況がよく分からない環境で動かすことを前提に、開発しなければならない。原子炉内は障害物があるのに、照明はない。脱輪したロボットは、進路上に溝があることを事前に把握できなかったので、対策が取れなかった。浅間教授は「想定外でも対応できるようにロボットを開発するのは難しい」と指摘する。
その上、作業場に人が近づけないため、ロボットが作業場までたどり着くには、細い所で直径10センチほどしかない配管内を進んでいくしかない。結果としてロボットの形や大きさが制限されてしまう。
さらに作業場には、今も熱を持つ燃料デブリを冷やすために冷却水が注がれており「ロボットにとっては雨が降っているようなもの」という。高レベルの放射線は、カメラに組み込まれている半導体のシリコンなどを劣化させる。
●デブリ取り出し
廃炉作業の中でも最難関とされる燃料デブリの取り出しに向けて、18年1月に2号機で釣りざお型の機器を使い始めた。19年2月には、燃料デブリとみられる小石状の堆積物の撮影に初めて成功。直接触れて、動かすこともできた。
ただ、1~3号機の燃料デブリは、推定で計880トンに及ぶが、形状や実際の重さなど分かっていないことが多い。切断して取り出すロボットを開発するとしても、切断によって燃料デブリの粉末が飛び散るのを防ぐ必要もある。
一方、1号機では汚染水の中にある燃料デブリを調査するため潜水機能付きボート型ロボットが開発されている段階で、本格的な取り出し作業までの道のりは長い。
東電によると、廃炉関連の作業には30種類以上のロボットが投入され、作業を依存する割合は、今後さらに増えるとみられる。
東電や原子炉メーカー、研究機関などでつくる国際廃炉研究開発機構(IRID)の奥住直明・開発計画部長は「放射線にも耐えられるロボットを開発していけるかが重要なポイント」と話す。【塚本恒】
|